|
|
| Line 26: |
Line 26: |
| | </div><br> | | </div><br> |
| | | | |
| − | == '''PROTOTYPE: ''' == | + | == ''''''PROTOTYPE''': ''' == |
| | | | |
| | [[File: Photo2.jpg | 800px]] | | [[File: Photo2.jpg | 800px]] |
| Line 36: |
Line 36: |
| | </html> | | </html> |
| | | | |
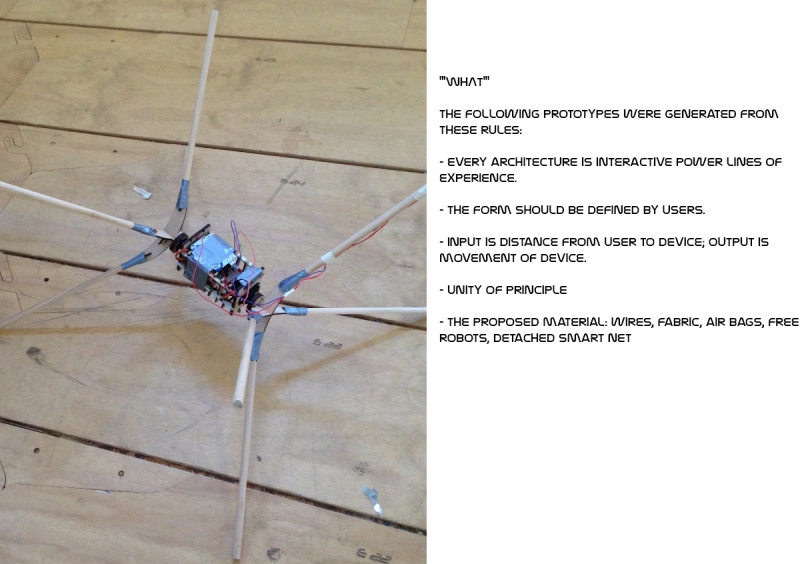
| − | '''WHAT''' | + | ''''''WHAT'''''' |
| − | | + | |
| − | The following prototypes were generated from these rules:
| + | |
| − | | + | |
| − | - Every architecture is interactive power lines of experience.
| + | |
| − | | + | |
| − | - The form should be defined by users.
| + | |
| − | | + | |
| − | - Input is distance from user to device; output is movement of device.
| + | |
| − | | + | |
| − | - unity of principle
| + | |
| − | | + | |
| − | - the proposed material: wires, fabric, air bags, free robots, detached smart net
| + | |
| − | | + | |
| − | '''PROTOTYPE''' | + | |
| − | | + | |
| − | <html>
| + | |
| − | <iframe src="//player.vimeo.com/video/91508926" width="850" height="480" frameborder="0" webkitallowfullscreen mozallowfullscreen allowfullscreen></iframe> <p><a href="http://vimeo.com/90279130"</p>
| + | |
| − | </html>
| + | |
| − | | + | |
| − | | + | |
| − | <html>
| + | |
| − | <iframe width="850" height="500" src="//www.youtube.com/embed/RTeeNdUIKF8" frameborder="0" allowfullscreen></iframe>
| + | |
| − | </html>
| + | |
| − | | + | |
| − | [[File:Robo 0.jpg|280px]][[File:Robo 1.jpg|280px]][[File:Robo 2.jpg|280px]]
| + | |
| − | | + | |
| − | [[File: Movement.jpg | 850px]]
| + | |
Revision as of 23:37, 26 June 2014
'PROTOTYPE':
RoboZoo 4.0 from Radek on Vimeo.
'WHAT'

